- JIIAについて
- 活動内容
- 入会案内
- 規格紹介
- 規格書・資料ダウンロード
![]()
![]()


The OPC UA Companion Specification Vision(in short OPC Vision)provides a generic information model for all vision systems – from simple vision sensors to complex inspection systems. Put simply, it defines the essence of any vision system that does not necessarily have to be a “machine” vision system. OPC Vision is the accepted and officially supported OPC UA Companion Specification for vision systems by the OPC Foundation.
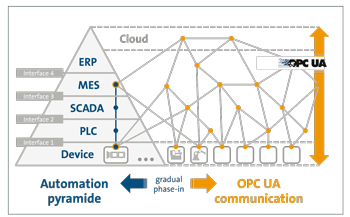
The scope is not only to complement or substitute existing interfaces between a vision system and its process environment by using OPC UA, but rather to create non-existing horizontal and vertical integration abilities to communicate relevant data to oher authorized process participants, e.g. right up to the IT enterprise level. It is possible to have a gradual phase-in of OPC Vision with coexisting other interfaces. The benefits are a shorter time to market by a simplified integration, a generic applicability and scalability and an improved customer perception due to defined and consistent semantics. Specific example: OPC Vision enables Machine Vision to speak to the whole factory and beyond.
Fundamentals
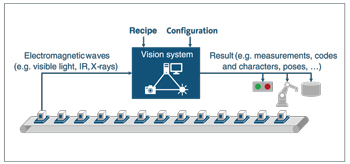
A vision system is any system that has the capability to record and process digital images or video streams, typically with the aim of extraciting information from this data. The output of a vision system can be any image-based information like measurements, inspection results, process control data, robot guidance data, etc.
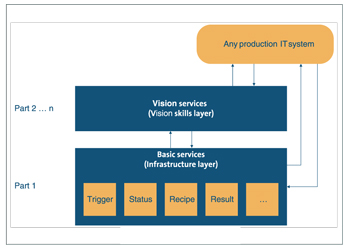
The basic concept of OPC Vision is a subdivision into several parts. Part 1 includes the basis specification and describes an infrastructure layer which provides basic services in a generic way. From part 2, a vision skill layer is addressed which provides more specific vision services.
OPC Vision, part 1
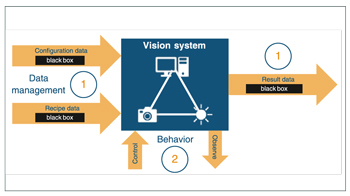
Part 1 describes an abstraction of the generic vision system, i.e. the representation of the so called “digital twin” of the system. It handles the management of recipes, configurations and results in a standardization way, wheresa the contents stay vendor-specific and are treated as black boxes(1). It allows the control of a vision system in a generalized way, abstracting the necessary behavior via a state machine concept (2).
Future parts
In future parts, the generic basic information model will shift to a more specific “skill-based” information model. Vision skills could include presence detection, completeness inspection, pose detection, etc. For this purpose, the proprietary input and output data black boxes will be broken down and substituted with standardized information structures and semantics.
![]()